- Experimental Recipes
Experimental Recipes] Waiter Robot "Pen-chan" (Shibuya Kyoiku Gakuen Makuhari Junior High School)
2018.12.01<What to prepare
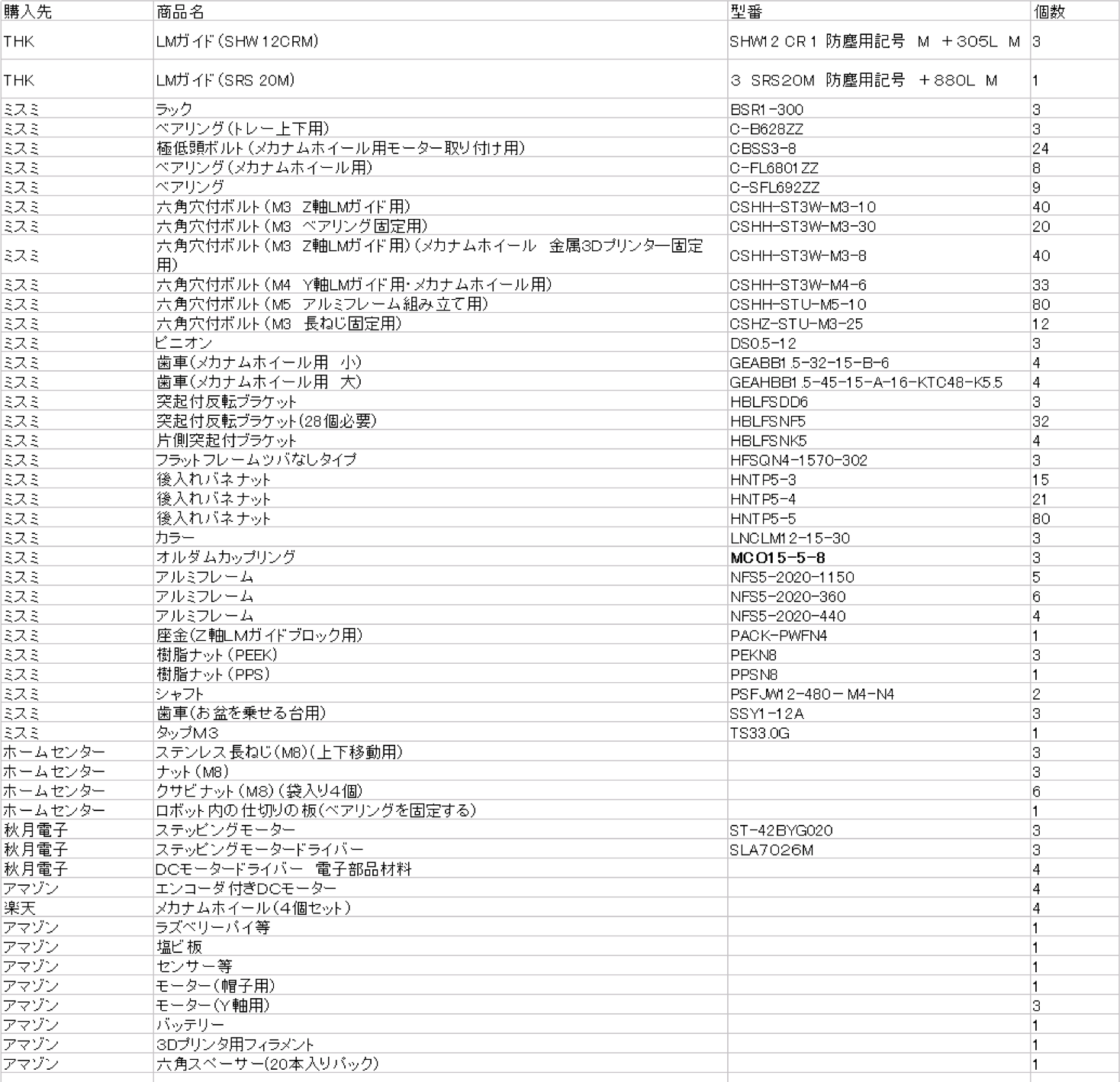
The materials listed in the table below were used to make the penchan.
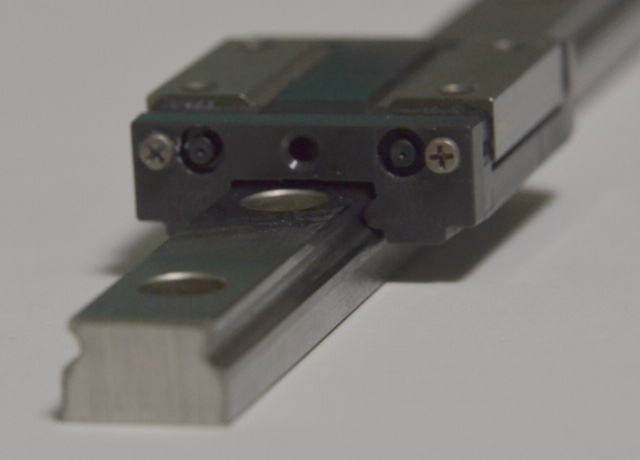
LM Guide
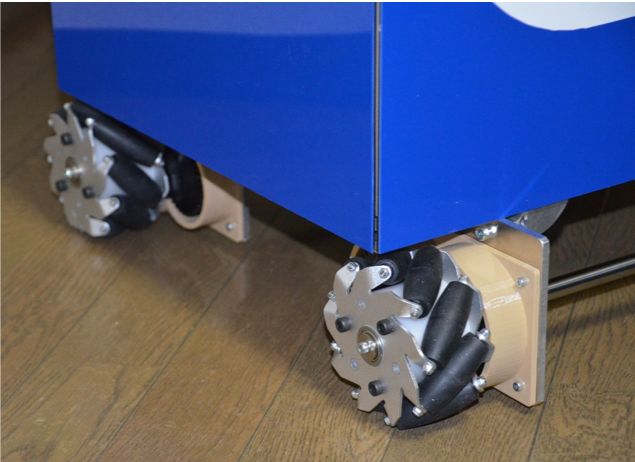
mecanum wheel

<Catering operation
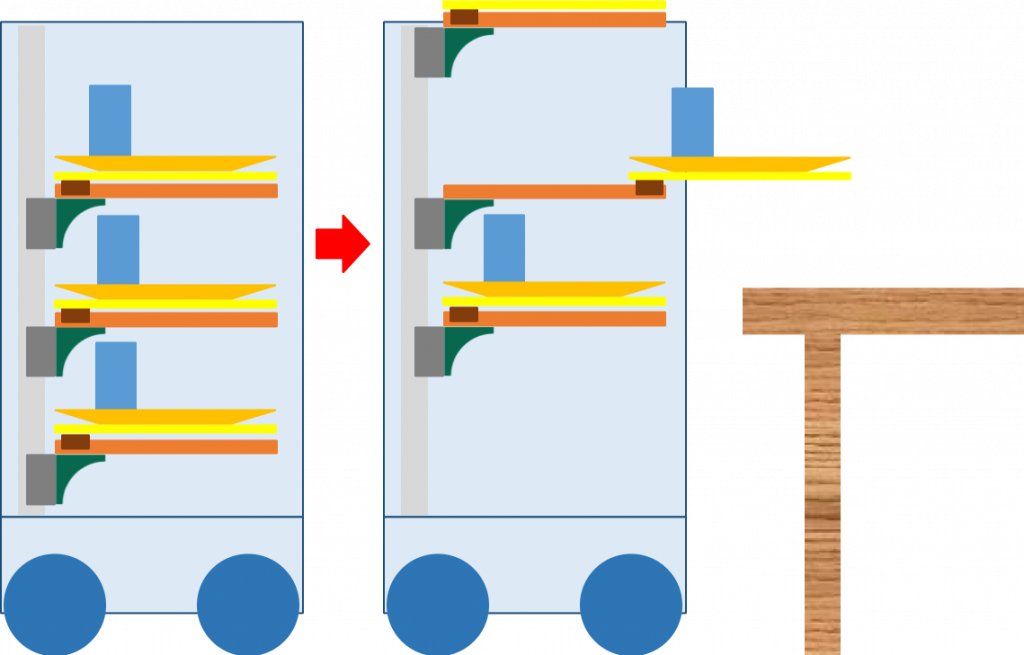
This section describes the movements performed by Penn-chan. First, when a penchan receives food from the kitchen, it proceeds to a designated table. Then, as shown here, they serve the trays one by one, and when all the trays have been served, they return to the kitchen.
<構造~上下の動作~>
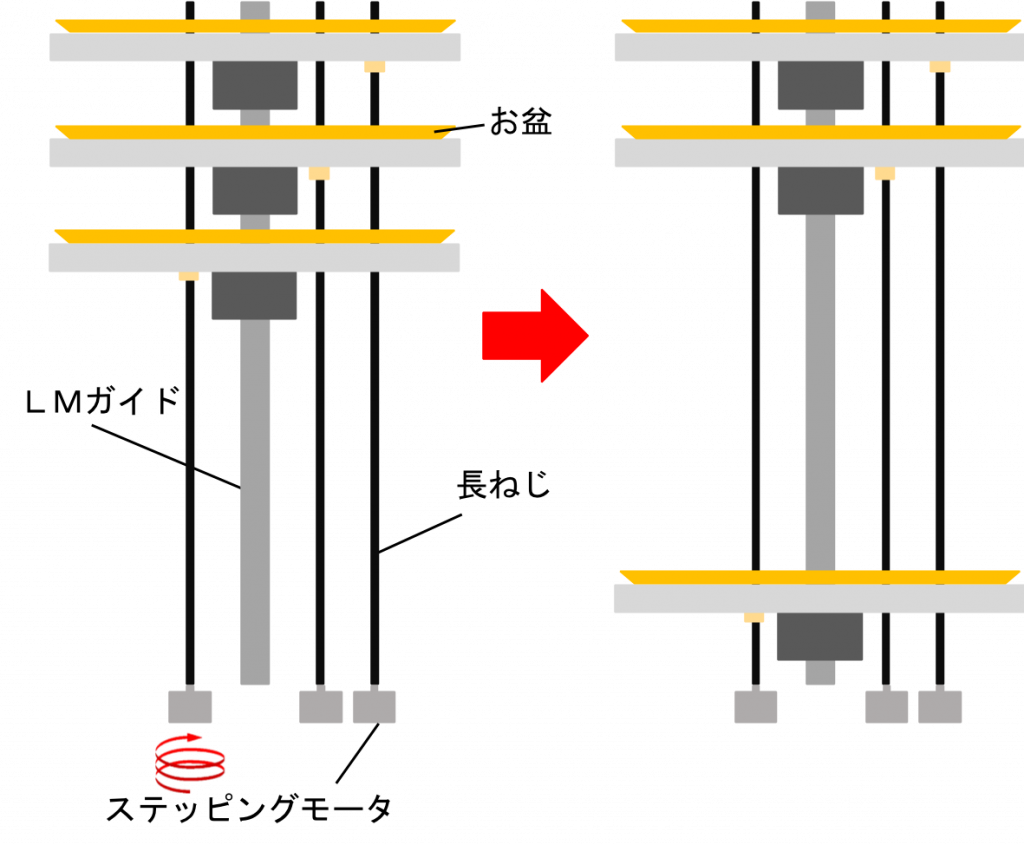
This is about the mechanism that moves it up and down. There is one long LM guide attached to the center of the tray, and a platform on which the tray is placed. Each platform has one long screw and is connected to the tray by a nut. A stepping motor is attached under the long screw, and the stand moves up and down by rotation of the motor.
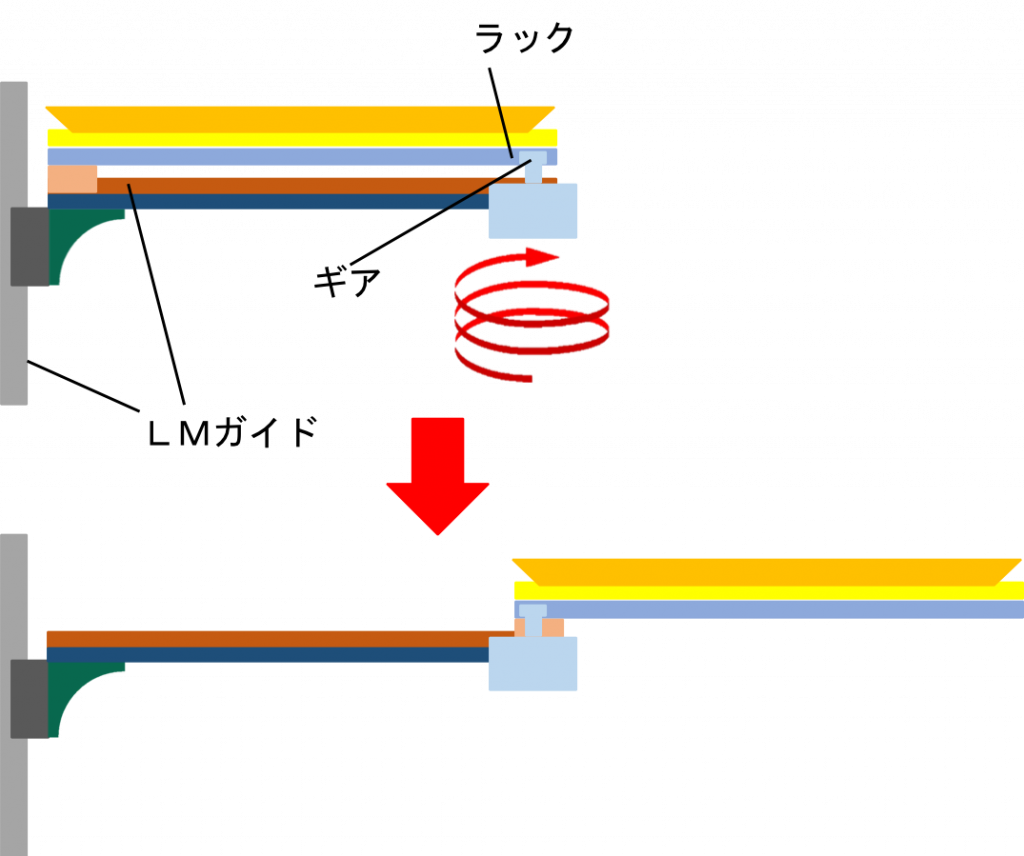
<構造~前後の動作~>
This is about the mechanism that moves the stand on which the tray is placed back and forth. This mechanism moves by meshing a rack with a gear attached to a stepping motor. This mechanism also incorporates an LM guide in the center.
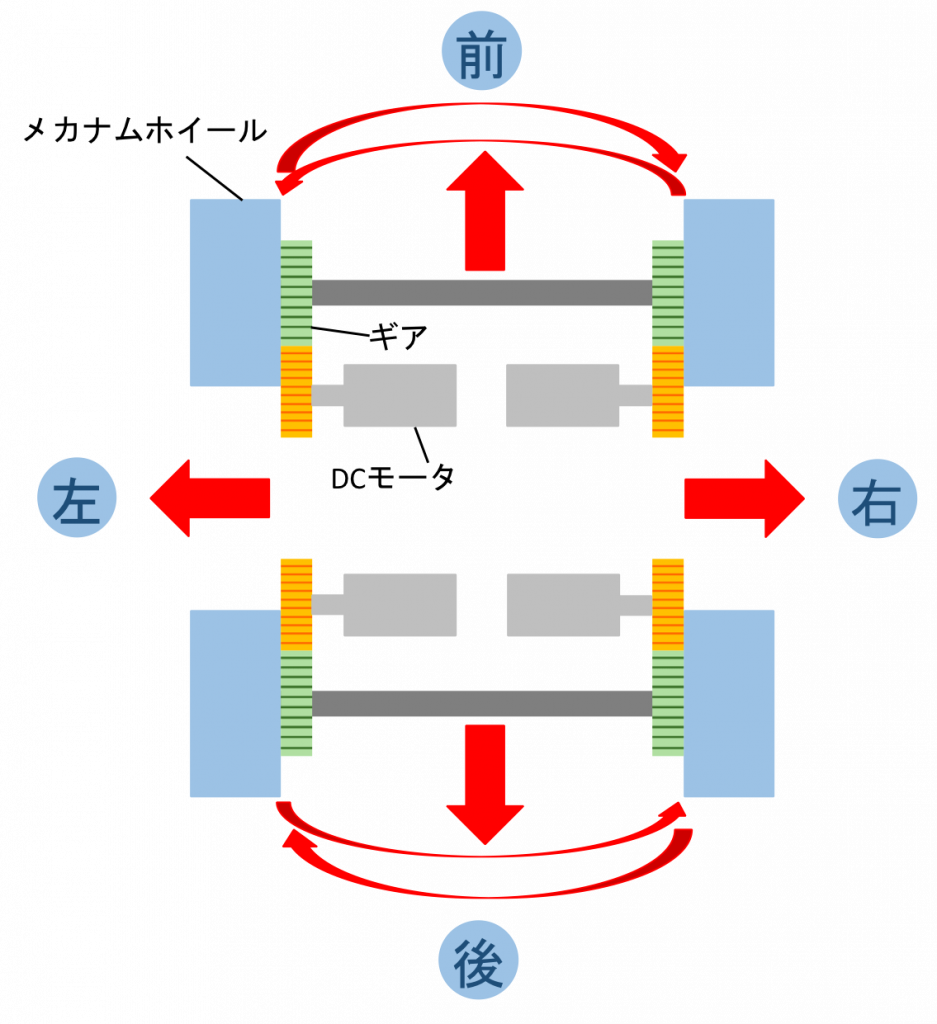
<構造~走行~>
This is about how to make it run. This time, we used a wheel called a mecanum wheel and a DC motor. The Mecanum wheel can rotate back and forth, left and right, so it can move in a variety of ways.
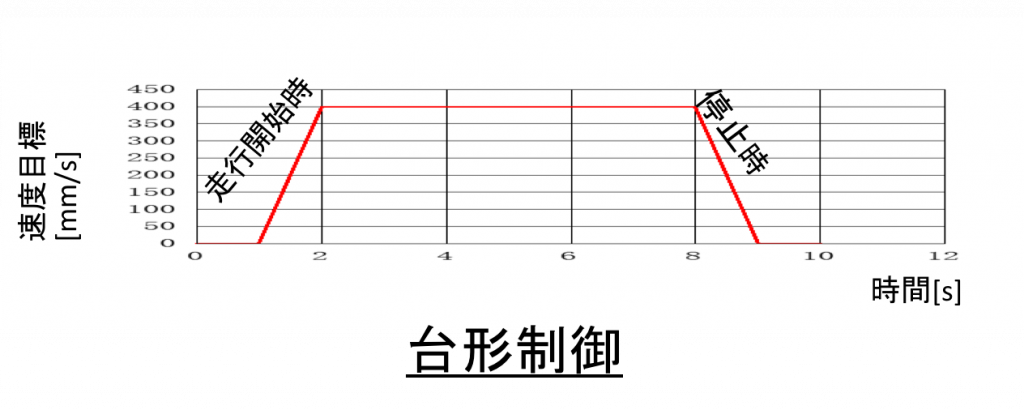
<Control
In this case, this trapezoidal control was used to reduce the acceleration at the start and stop of running. This is done to prevent the food from spilling.
The position target for running the robot was obtained by integrating the velocity target.
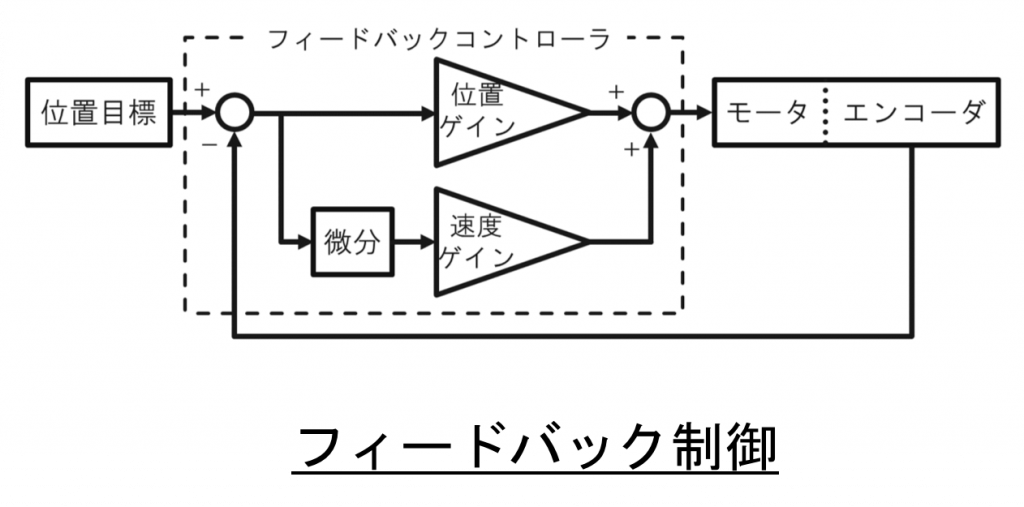
 In feedback control, the position target is put into the controller, which then drives the motor. The motor has an encoder, which determines exactly how far the robot has traveled.
In feedback control, the position target is put into the controller, which then drives the motor. The motor has an encoder, which determines exactly how far the robot has traveled.
The encoder readings are then fed back into the controller again. This is repeated at high speed so that the robot advances according to the position target while adjusting its speed.
<Completion
