- 実験レシピ
【実験レシピ】給仕ロボット「ペンちゃん」(渋谷教育学園幕張中学校)
2018.12.01<用意するもの>
ペンちゃんを作るにあたり下表の材料を使用しました
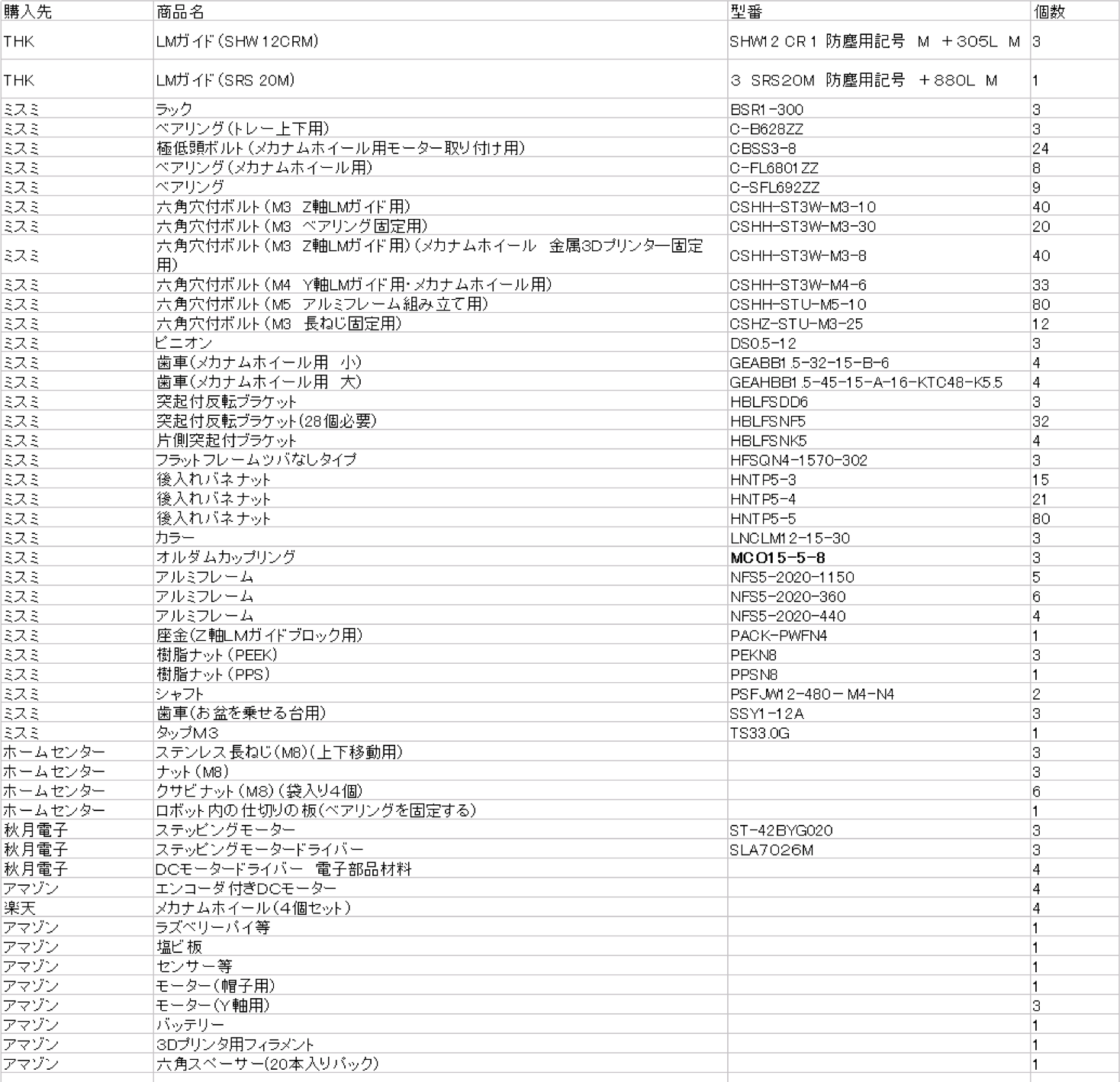
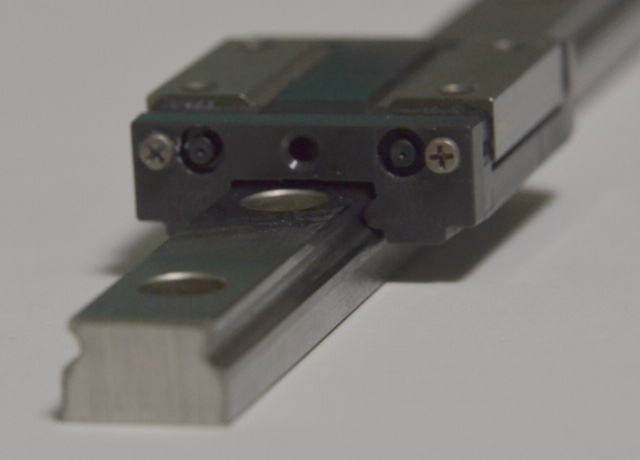
LMガイド
メカナムホイール

<配膳動作>
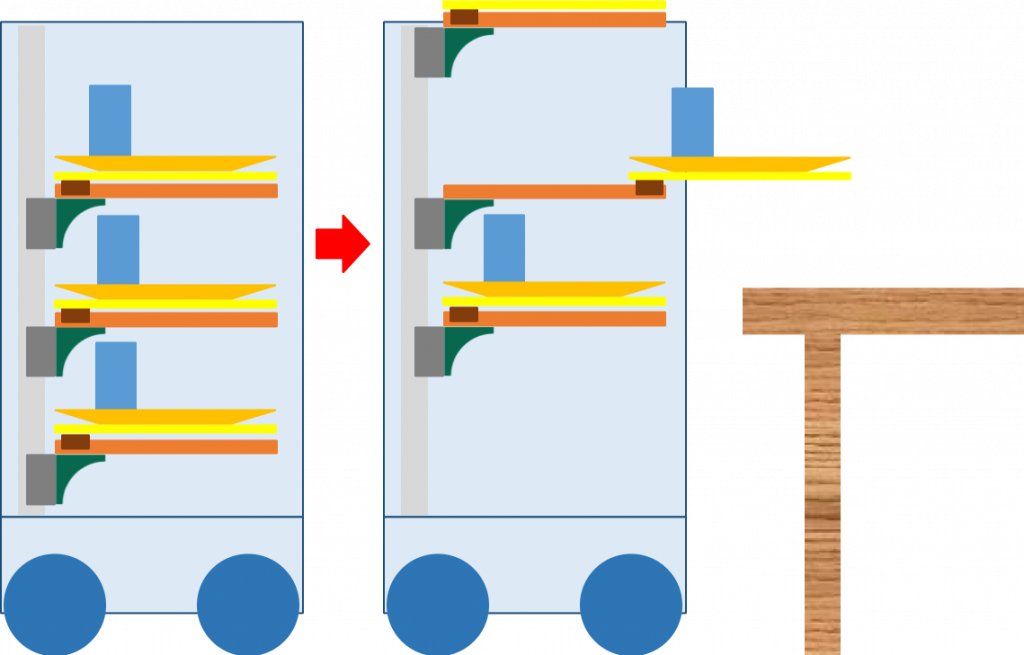
ペンちゃんが行う動きについてです。まず、ペンちゃんは厨房で料理を受け取ると、決まったテーブルへと進んでいきます。そしてこのように、お盆を一枚ずつ出し、お盆を全て出し終わるとまた厨房へ帰っていきます。
<構造~上下の動作~>
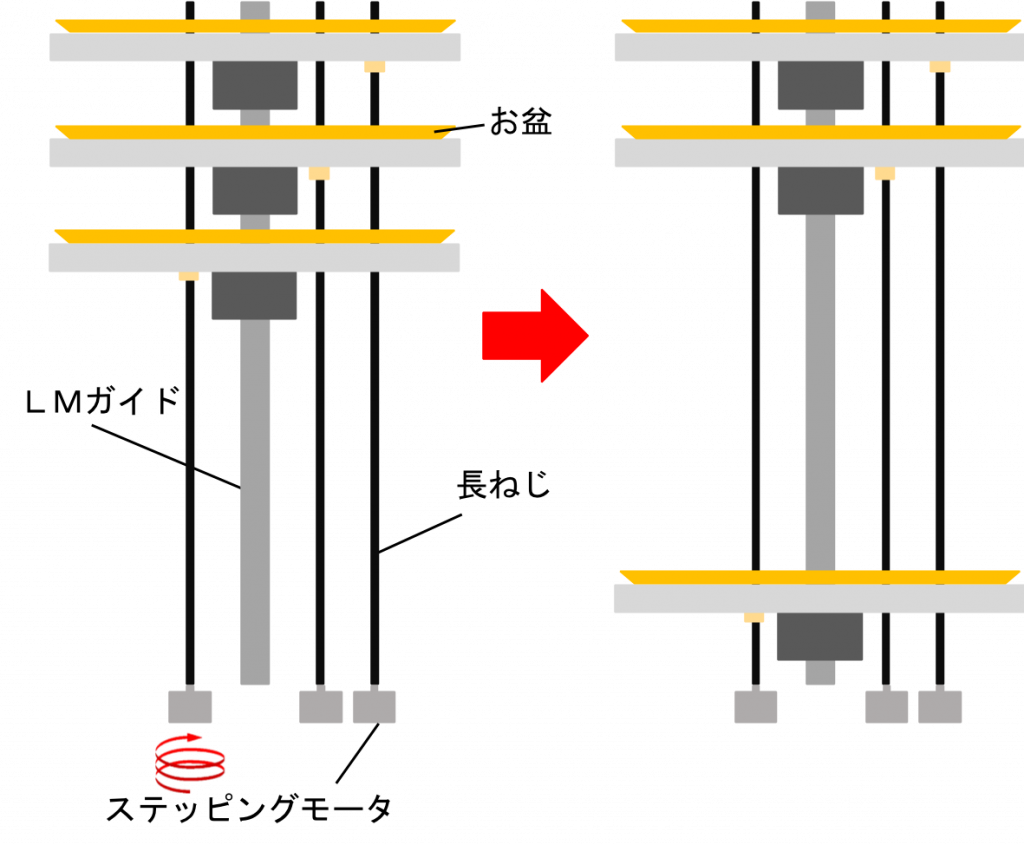
上下に動かす機構についてです。中心に一本長いLMガイドが付いていて、そこにお盆を載せる台が付いています。お盆を乗せる台にはそれぞれに1本ずつ長ねじが付いていて、台とはナットでつながっています。長ねじの下にはステッピングモータが付いていて、モータの回転により台が上下するようになっています。
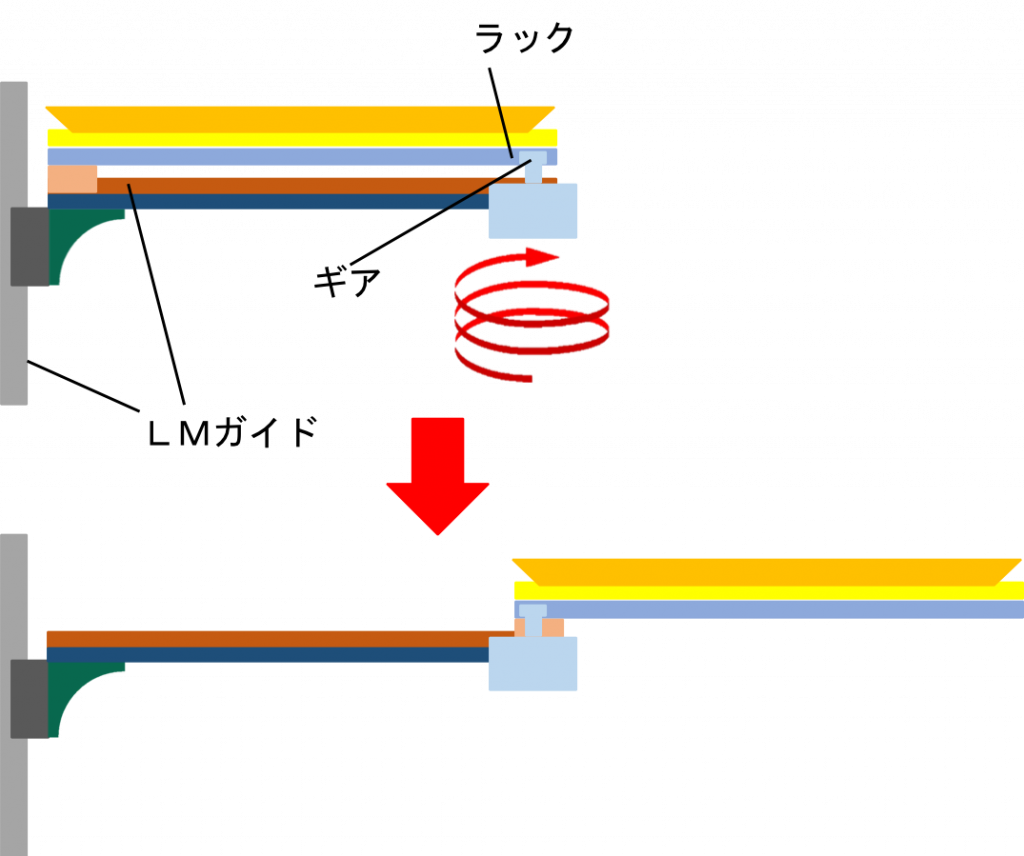
<構造~前後の動作~>
お盆を乗せる台を前後に動かす機構についてです。こちらはステッピングモータについたギアとラックをかみ合わせて動かしています。この機構にも真ん中にLMガイドが組み込まれています。
<構造~走行~>
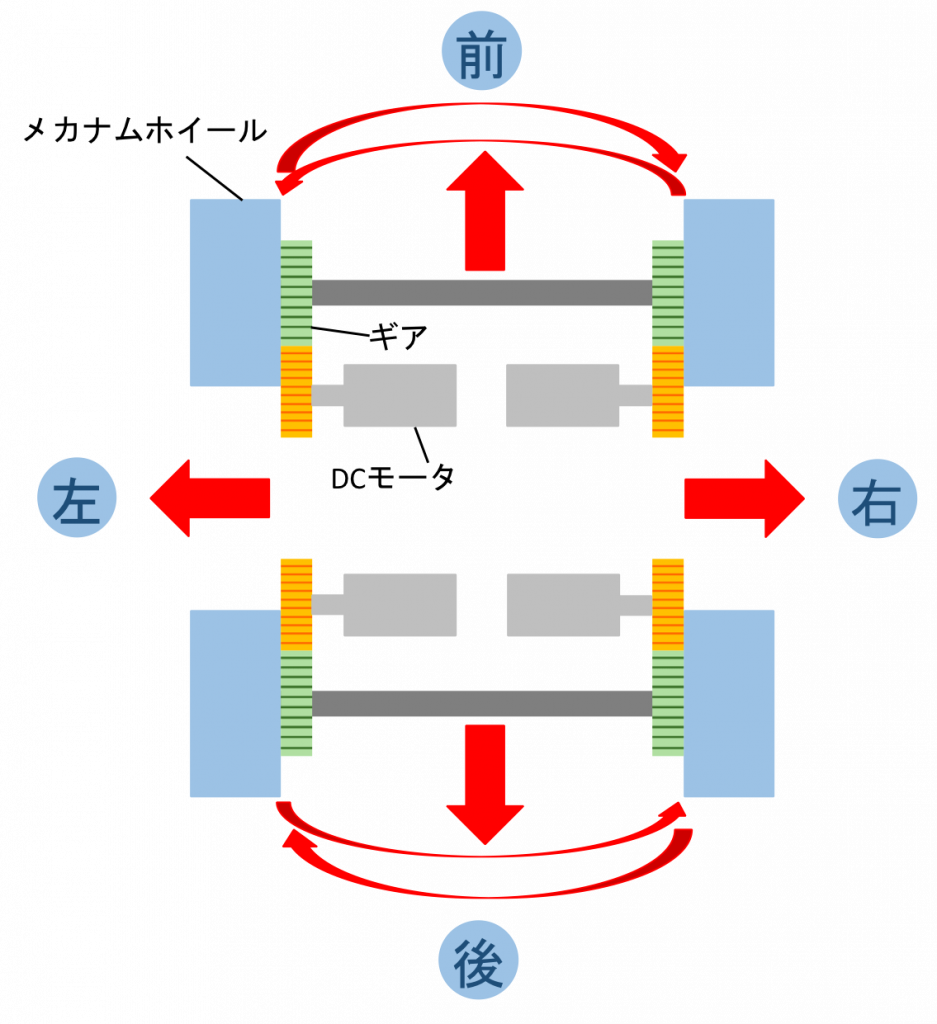
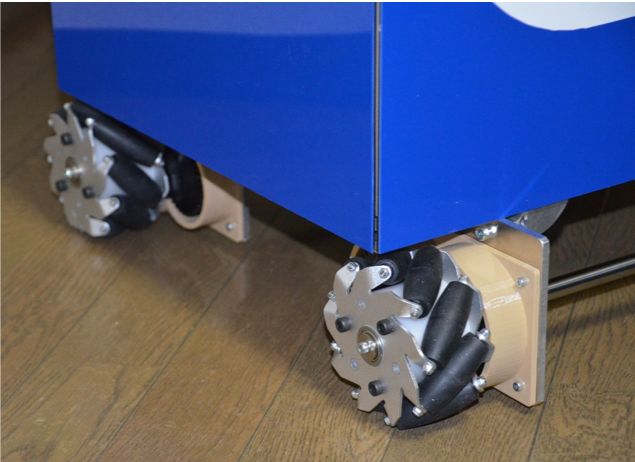
走らせ方についてです。今回はメカナムホイールという車輪とDCモータを使いました。メカナムホイールを使うと前後左右回転の運動が出来るので、様々な動き方が可能になります。
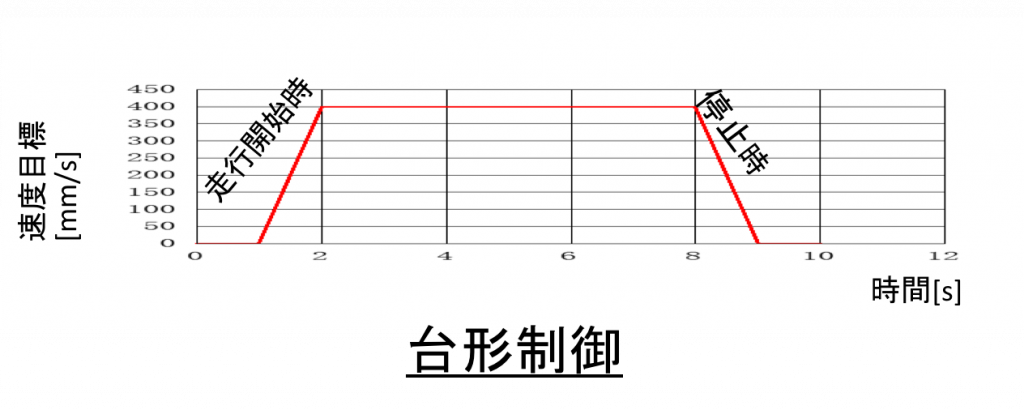
<制御>
今回は走行開始時・停止時の加速度を小さくするために、この台形制御を行いました。これは、料理をこぼれにくくするための工夫です。
ロボットを走らせる位置目標は、速度目標を積分して求めました。
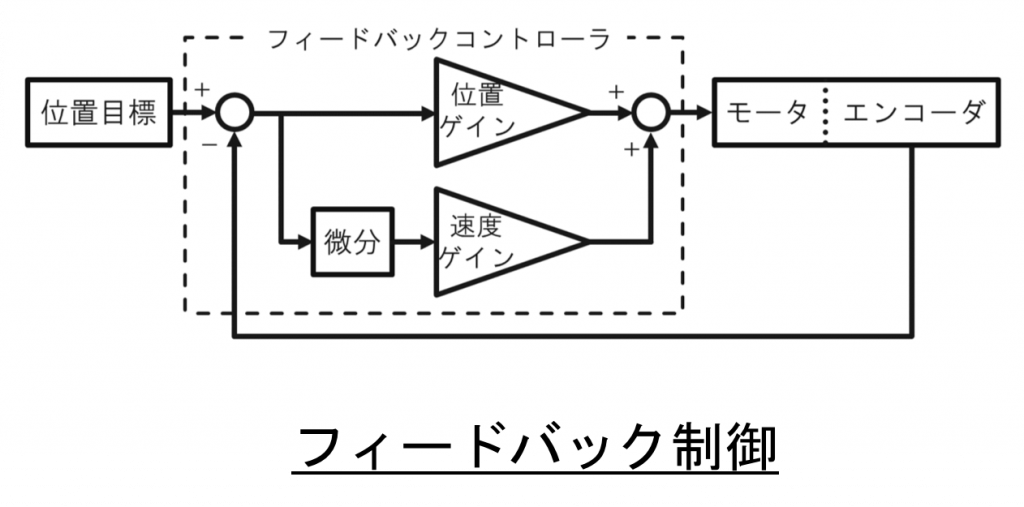
 フィードバック制御では、位置目標をコントローラに入れ、そのコントローラによってモータを駆動します。モータにはエンコーダが付いており、これによってロボットがどれくらいの距離を進んだのかを正確に求めています。
フィードバック制御では、位置目標をコントローラに入れ、そのコントローラによってモータを駆動します。モータにはエンコーダが付いており、これによってロボットがどれくらいの距離を進んだのかを正確に求めています。
そこで、エンコーダで読み取った値をフィードバックし、再びコントローラに入れます。これを高速に繰り返すことで、ロボットは速度を調節しながら位置目標どおりに進むようになっています。
<完成>
